Title: Mobile Underwater Backscatter Networking
Author: Purui Wang, Sayed Saad Afzal (MIT); Fadel Adib (MIT & Cartesian)
Scribe: Letian Zhu (Xiamen University)
Introduction
Low-power underwater sensor networks have critical applications in ocean climate monitoring, offshore aquaculture, and underwater infrastructure maintenance. Underwater backscatter technology promises to reduce power consumption by 5-6 orders of magnitude compared to traditional underwater acoustic networks by having sensor nodes reflect rather than generate acoustic signals. However, existing underwater backscatter systems fail under mobility - a fundamental requirement for practical deployments where mobile access points (underwater drones, surface vessels) need to collect data from stationary sensor networks. The core challenge is that underwater environments experience significant Doppler effects due to the 200,000× slower propagation speed of acoustic waves compared to RF (1,500 m/s vs. 3×10⁸ m/s), making traditional RF backscatter techniques inadequate for mobile underwater scenarios.
Key idea and contribution
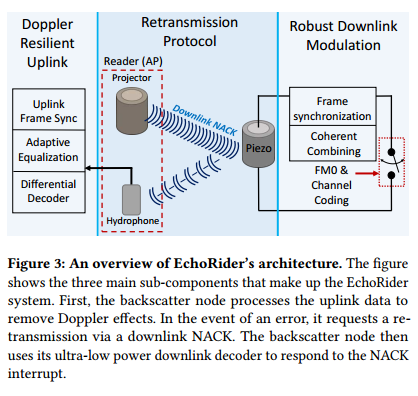
The authors present EchoRider, the first underwater backscatter system capable of reliable operation under mobility. EchoRider introduces three key innovations: (1) A sub-Nyquist chirp decoder that brings LoRa-style frequency diversity robustness to underwater backscatter while remaining ultra-low-power. Unlike traditional chirp decoding requiring high-speed ADCs or complex mixing, EchoRider performs direct sub-Nyquist bandpass sampling, leveraging the fact that underwater acoustic carrier frequency and bandwidth are within the same order of magnitude. (2) A NACK-based full-duplex retransmission protocol that avoids the overhead of ACK-based schemes in high-latency underwater environments. The protocol enables efficient packet recovery by having nodes opportunistically transmit until receiving downlink NACKs, minimizing training sequence overhead. (3) A Doppler-resilient uplink decoding pipeline incorporating adaptive equalization, differential decoding for phase cancellation, polar coding for error correction, and dynamic equalizer retraining to combat mobility-induced channel variations.
Evaluation
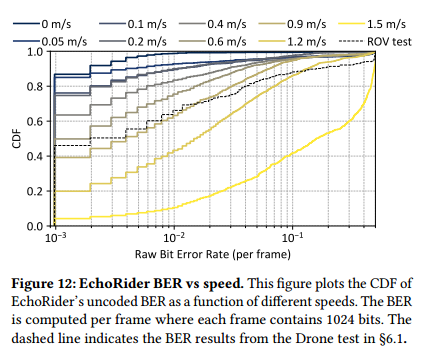
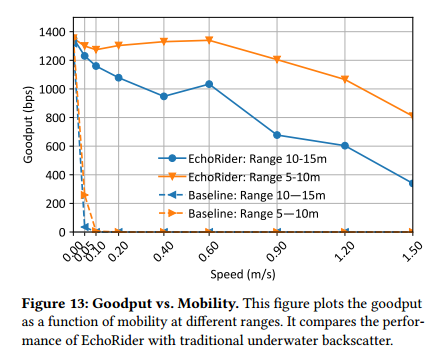
The authors built a complete EchoRider prototype and conducted over 1,200 real-world mobile experiments in river environments using controlled speed platforms and commercial underwater drones. EchoRider dramatically outperforms state-of-the-art baselines, improving bit error rate by over 125× and maintaining underwater goodput of 0.8 kbps at speeds up to 2.91 knots (1.5 m/s), while baselines fail at speeds as low as 0.17 knots. The system achieves a median BER of 4×10⁻³ at 2.5 kbps throughput when nodes move at 0.9 m/s, compared to a baseline BER of 0.25 at much lower speeds. Multi-node deployments demonstrate successful collision avoidance using Aloha-based MAC protocols. This result is significant because it enables practical underwater IoT deployments where mobile platforms can efficiently collect data from battery-constrained sensor networks, opening new possibilities for long-term ocean monitoring and underwater infrastructure maintenance.
Question
Q1: I had a question on your GoodPut results. It seems like the performance improves at moderate mobility rates compared to low mobility rates, and I’m wondering if there’s any intuition behind that.
A1: Part of the reason is that experiments in the river are harder - the river is a more complex environment than the ocean because the multipath is just so significant. Sometimes being further improves the performance than being very close. The difference is really in the noise. At 0.6 m/s, it’s slightly lower but still good performance, and sometimes being at different distances can affect performance due to the complex multipath environment in river conditions.
Q2: About power consumption - how does your system compare to the baseline in terms of power consumption?
A2: Both systems are still within the same order of magnitude in terms of power consumption - both are sub-500 microwatts, maybe between 100 and 300 microwatts for both the baseline and our system. It doesn’t matter if you add more power to the state-of-the-art system because the problem is not the power - the problem is that you don’t have the complex decoding that needs to be implemented. We optimized it a lot while maintaining similar power levels.
Q3: You mentioned mobility causes very high error rates. Could you talk about which part of the design is actually designed to handle those mobility issues?
A3: There are multiple reasons why we’re able to deal with mobility. One is the chirp - what happens with mobility is you lose track of the phase and get fading, but with chirps, they just get shifted, so you can still decode them. We also built our decoding pipeline with a phase lock loop that can track on a symbol-by-symbol basis with an adaptive equalizer. On the downlink, we built a very efficient sub-Nyquist decoder that can handle chirps within a very low power budget. The NACK retransmission protocol allows you to achieve high goodput. The physical layer alone gives significant improvement at the throughput level.
Q4: Does the node need to always overhear the downlink transmission from the reader?
A4: This is a great question that relates to our live implementation. There are multiple ways of dealing with this. We’ve built a hierarchical wakeup mechanism where the backscatter node is initially asleep, then there’s a hierarchical mechanism where it listens to some power, wakes up, and then wakes up further. We realize that making it entirely battery-free is not the goal - you can add a battery as long as it can last for a few decades. It becomes an interesting tradeoff where we’re willing to add a small battery and have it wake up once every 30 minutes, rather than making the system much more complex, because simple is scalable.
Personal thoughts
EchoRider addresses an important limitation in underwater backscatter systems by enabling operation under mobility conditions. The sub-Nyquist sampling approach exploits the specific characteristics of underwater acoustics effectively. The system design balances energy constraints with performance requirements appropriately. However, the throughput remains limited (sub-kbps range), which constrains applications to basic sensor data collection. The work also faces practical challenges in scaling to larger networks and handling more complex mobility patterns. The contribution is primarily in extending existing underwater backscatter techniques to mobile scenarios.